Technology
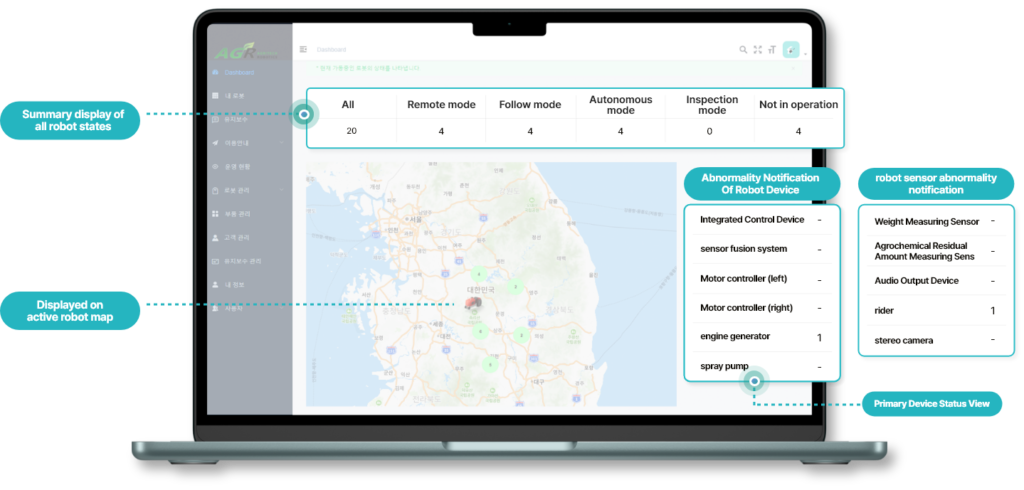
ICT-based integrated monitoring system technology
integrated monitoring system
- Monitoring status information of outdoor and greenhouse cultivation operation robots
- Management of dough condition and harvest information
- User friendly UI
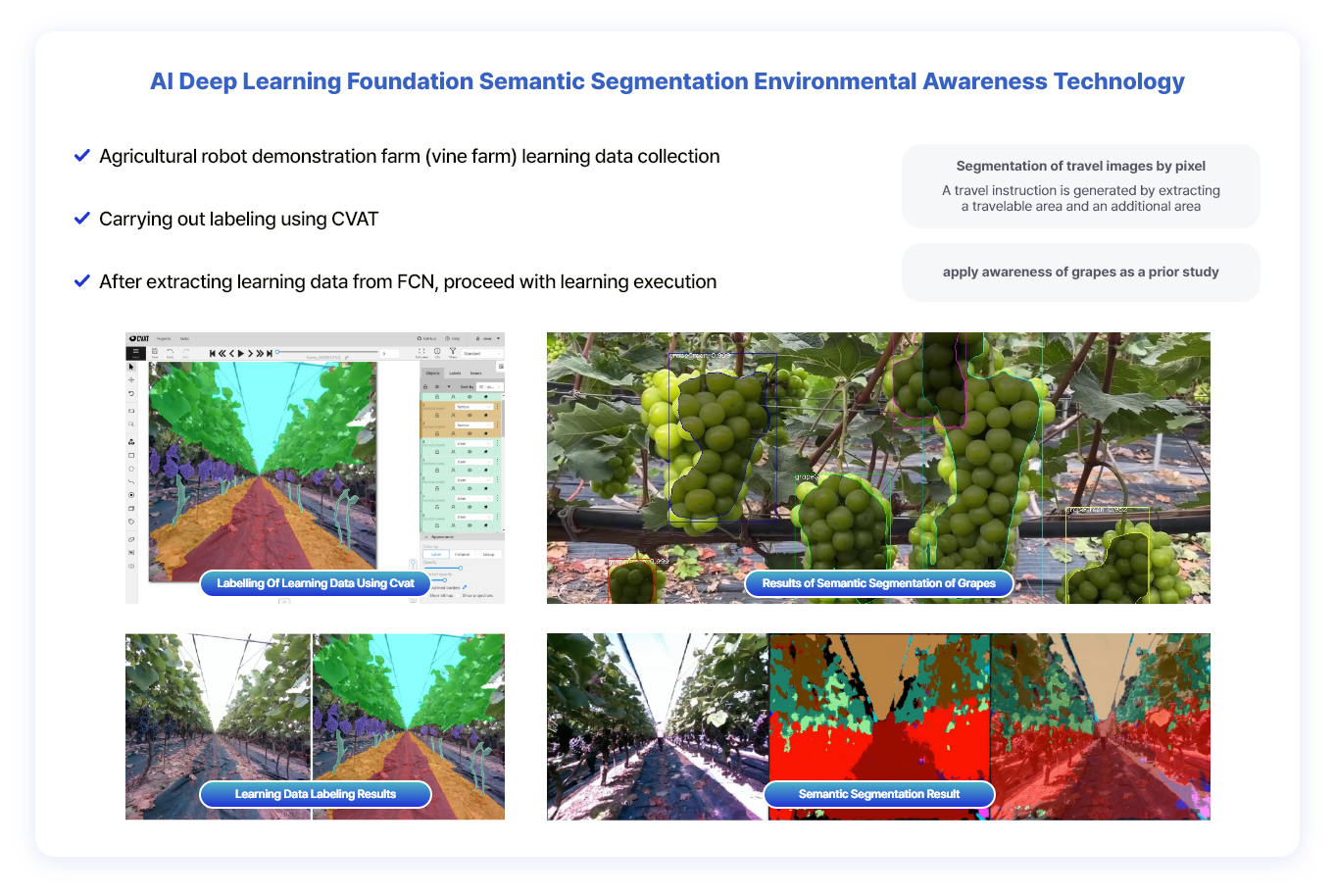
Environmental recognition technology using semantic segmentation technology based on AI deep learning
- Agricultural robot demonstration farm (grape farm) learning data collection
- Performing labeling using CVAT
- Extract training data with FCN and proceed with learning
Separate driving video into pixels
Extract the driveable area and additional area and generate the drive command
Extract the driveable area and additional area and generate the drive command
Applying grape recognition in previous research
Agricultural robot travel route generation technology
- Agricultural robot demonstration farm (grape farm) environmental video data collection
- Label people, animals, and vehicle obstacles using CVAT
- Executing real-time calculations to maintain distance from people in tracking mode

Recognition results for farm workers and dynamic obstacles
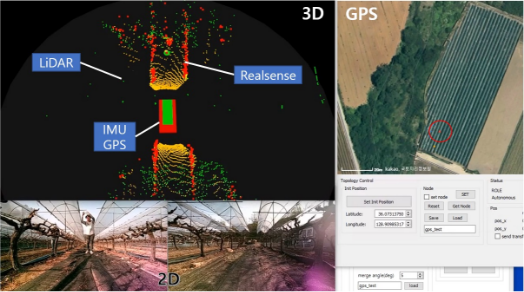
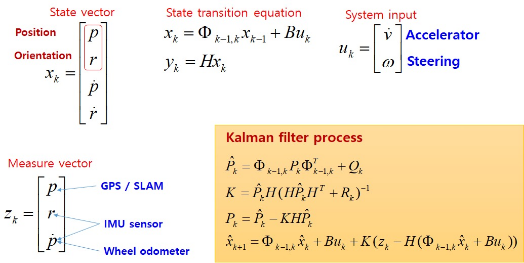
Designing a Kalman filter for GPS, IMU, and wheel encoder information fusion
Transformation and filtering for fusion of lidar and 3D camera data
Generation of harvest movement path for robot arm
- Plant surrounding environment recognition (leaves, thin stems, thick stems)
- Application of obstacle avoidance technology applied to driving algorithm
-> Generation of movement path for robot arm that can reach crops
Simulation for robot arm movement path generation
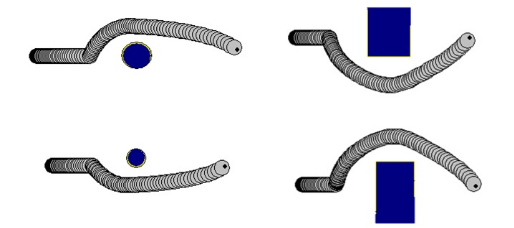
Achieving real-time path planning by adding predetermined rotation and retreat functions for collision detection for rectangular platforms to the DWA (Dynamic Window Approach) algorithm